C# OpenCV 강좌 : 제 21강 - 코너 검출 (1)
코너(Corner)
영상이나 이미지의 모서리(코너)를 검출하기 위해 사용합니다.
영상이나 이미지에서 Good Feature to Track 방법과 Harris Corner Detector 방법을 이용하여 검출 할 수 있습니다.
원본(Source, src)은 영상이나 이미지를 사용합니다.
Good Feature to Track
클래스 코드
using System;
using System.Collections.Generic;
using System.Linq;
using System.Text;
using System.Threading.Tasks;
using OpenCvSharp;
namespace Project
{
class OpenCV : IDisposable
{
IplImage gray;
IplImage corner;
public IplImage GrayScale(IplImage src)
{
gray = new IplImage(src.Size, BitDepth.U8, 1);
Cv.CvtColor(src, gray, ColorConversion.BgrToGray);
return gray;
}
public IplImage GoodFeaturesToTrack(IplImage src)
{
corner = new IplImage(src.Size, BitDepth.U8, 3);
gray = new IplImage(src.Size, BitDepth.U8, 1);
IplImage eigImg = new IplImage(src.Size, BitDepth.U8, 1);
IplImage tempImg = new IplImage(src.Size, BitDepth.U8, 1);
Cv.Copy(src, corner);
gray = this.GrayScale(src);
CvPoint2D32f[] corners;
int cornerCount = 150;
Cv.GoodFeaturesToTrack(gray, eigImg, tempImg, out corners, ref cornerCount, 0.01, 5);
Cv.FindCornerSubPix(gray, corners, cornerCount, new CvSize(3, 3), new CvSize(-1, -1), new CvTermCriteria(20, 0.03));
for (int i = 0; i < cornerCount; i++)
{
Cv.Circle(corner, corners[i], 3, CvColor.Black, 2);
}
return corner;
}
public void Dispose()
{
if (gray != null) Cv.ReleaseImage(gray);
if (corner != null) Cv.ReleaseImage(corner);
}
}
}세부 코드
corner = new IplImage(src.Size, BitDepth.U8, 3);
gray = new IplImage(src.Size, BitDepth.U8, 1);
IplImage eigImg = new IplImage(src.Size, BitDepth.U8, 1);
IplImage tempImg = new IplImage(src.Size, BitDepth.U8, 1);코너는 8Bit 단일 채널, GrayScale 영상으로 검출합니다.
출력할 이미지인 corner와 검색할 이미지인 gray를 만듭니다.
또한, GoodFeaturesToTrack에 사용하기 위한 매개변수 이미지 eigImg, tempImg를 만들어줍니다.
Cv.Copy(src, corner);
gray = this.GrayScale(src);corner에 원본 이미지를 복사하여 덮어씌웁니다. gray는 GrayScale을 적용시킵니다.
CvPoint2D32f[] corners;
int cornerCount = 150;corners는 검색된 코너의 벡터 값이며, cornerCount는 반환할 코너의 최대 개수입니다.
이 값 보다 더 많은 코너가 검출되면 가장 값이 높은 코너가 반환됩니다.
Cv.GoodFeaturesToTrack(gray, eigImg, tempImg, out corners, ref cornerCount, 0.01, 5);Cv.GoodFeaturesToTrack()를 이용하여 코너들을 검출합니다.
Cv.GoodFeaturesToTrack(그레이스케일, eigImg, tempImg, 코너점, 코너의 개수, 퀄리티 레벨, 최소 거리)입니다.
qualityLevel(퀄리티 레벨)은 코너 품질을 설정하는 데 사용됩니다.
가장 좋은 코너의 측정 값에 퀄리티 레벨 수치를 곱한 값 보다 낮은 값이면 그 코너들은 무시됩니다.
만약, 가장 좋은 코너의 측정 값이 1000에 퀄리티레벨이 0.01이라면 10이하의 코너 측정값은 검출하지 않습니다.
minDistance(최소 거리)는 검출된 코너들의 최소거리입니다.
최소거리의 이상의 값만 검출합니다.
만약 최소거리가 5라면, 최소거리가 5 이하인 값은 코너로 검출하지 않습니다.
Cv.FindCornerSubPix(gray, corners, cornerCount, new CvSize(3, 3), new CvSize(-1, -1), new CvTermCriteria(20, 0.03));Cv.FindCornerSubPix()를 이용하여 코너점들의 위치를 수정합니다.
Cv.FindCornerSubPix(그레이스케일, 코너점, 코너의 개수, win Size, zeroZone Size, 기준)입니다.
win Size는 검출하려는 부분의 절반 크기입니다.
만약, (3, 3) 일 경우 (3 * 2 + 1) x (3 * 2 + 1) = 7x7 의 부분을 검색합니다.
zeroZone Size는 검출에서 제외하려는 부분의 절반 크기입니다.
win과 동일한 계산방법을 사용합니다. (-1, -1)은 검출에서 제외하려는 부분이 없음을 의미합니다.
Criteria(기준)은 코너 정밀화 반복작업입니다.
new CvTermCriteria(maxlter, epsilon)입니다.
maxlter는 입력된 수치 만큼 반복작업하며, epsilon보다 값이 낮아지면 종료합니다.
for (int i = 0; i < cornerCount; i++)
{
Cv.Circle(corner, corners[i], 3, CvColor.Black, 2);
} for문과 Cv.Circle을 이용하여 검출된 코너점들을 corner이미지에 그립니다.
Good Feature to Track - Harris Corner Detector
클래스 코드
using System;
using System.Collections.Generic;
using System.Linq;
using System.Text;
using System.Threading.Tasks;
using OpenCvSharp;
namespace Project
{
class OpenCV : IDisposable
{
IplImage gray;
IplImage corner;
public IplImage GrayScale(IplImage src)
{
gray = new IplImage(src.Size, BitDepth.U8, 1);
Cv.CvtColor(src, gray, ColorConversion.BgrToGray);
return gray;
}
public IplImage GoodFeaturesToTrack(IplImage src)
{
corner = new IplImage(src.Size, BitDepth.U8, 3);
gray = new IplImage(src.Size, BitDepth.U8, 1);
IplImage eigImg = new IplImage(src.Size, BitDepth.U8, 1);
IplImage tempImg = new IplImage(src.Size, BitDepth.U8, 1);
Cv.Copy(src, corner);
gray = this.GrayScale(src);
CvPoint2D32f[] corners;
int cornerCount = 150;
Cv.GoodFeaturesToTrack(gray, eigImg, tempImg, out corners, ref cornerCount, 0.01, 5, null, 3, true, 0.01);
Cv.FindCornerSubPix(gray, corners, cornerCount, new CvSize(3, 3), new CvSize(-1, -1), new CvTermCriteria(20, 0.03));
for (int i = 0; i < cornerCount; i++)
{
Cv.Circle(corner, corners[i], 3, CvColor.Black, 2);
}
return corner;
}
public void Dispose()
{
if (gray != null) Cv.ReleaseImage(gray);
if (corner != null) Cv.ReleaseImage(corner);
}
}
}세부 코드
Cv.GoodFeaturesToTrack(gray, eigImg, tempImg, out corners, ref cornerCount, 0.01, 5, null, 3, true, 0.01);Cv.GoodFeaturesToTrack()를 그대로 이용하여 Harris Corner Detector를 적용할 수 있습니다.
Cv.GoodFeaturesToTrack()를 이용하여 코너들을 검출합니다.
Cv.GoodFeaturesToTrack(그레이스케일, eigImg, tempImg, 코너점, 코너의 개수, 퀄리티 레벨, 최소 거리, 마스크, 블록 크기, Harris 방법 사용 유/무, ksize)입니다.
mask(마스크)는 코너가 감지되는 영역을 지정합니다.
blockSize(블록 크기)는 코너 계산을 위한 평균 블록의 크기입니다.
useHarrisDetector(Haris 방법 사용 유/무)는 Harris 방법을 사용할지에 대한 bool값 입니다.
ksize는 Harris 방법의 매개 변수입니다.
Harris Corner Detector
클래스 코드
using System;
using System.Collections.Generic;
using System.Linq;
using System.Text;
using System.Threading.Tasks;
using OpenCvSharp;
namespace Project
{
class OpenCV : IDisposable
{
IplImage gray;
IplImage corner;
public IplImage GrayScale(IplImage src)
{
gray = new IplImage(src.Size, BitDepth.U8, 1);
Cv.CvtColor(src, gray, ColorConversion.BgrToGray);
return gray;
}
public IplImage HarrisCorner(IplImage src)
{
gray = new IplImage(src.Size, BitDepth.U8, 1);
corner = new IplImage(src.Size, BitDepth.F32, 1);
gray = this.GrayScale(src);
Cv.CornerHarris(gray, corner, 3, ApertureSize.Size3, 0.05);
Cv.Dilate(corner, corner);
return corner;
}
public void Dispose()
{
if (gray != null) Cv.ReleaseImage(gray);
if (corner != null) Cv.ReleaseImage(corner);
}
}
}세부 코드
Cv.CornerHarris(gray, corner, 3, ApertureSize.Size3, 0.05);Cv.CornerHarris()를 이용하여 Harris 방법을 적용합니다.
CvCornerHarris(그레이스케일, 반환이미지, ApertureSize, kisze)를 사용합니다.
Cv.Dilate(corner, corner);Cv.Dilate(corner, corner)를 이용하여 이미지에서 이웃한 화소들 중 최대 화소값으로 대체하여 선명하게 만듭니다.
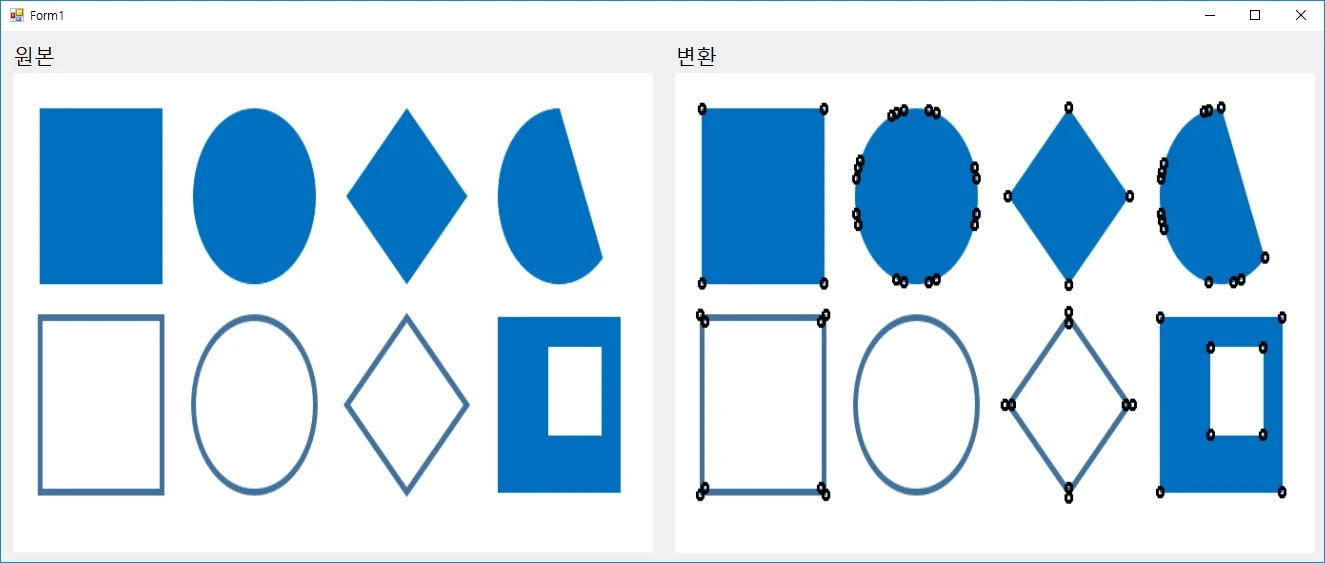
출력 결과
Good Feature to Track
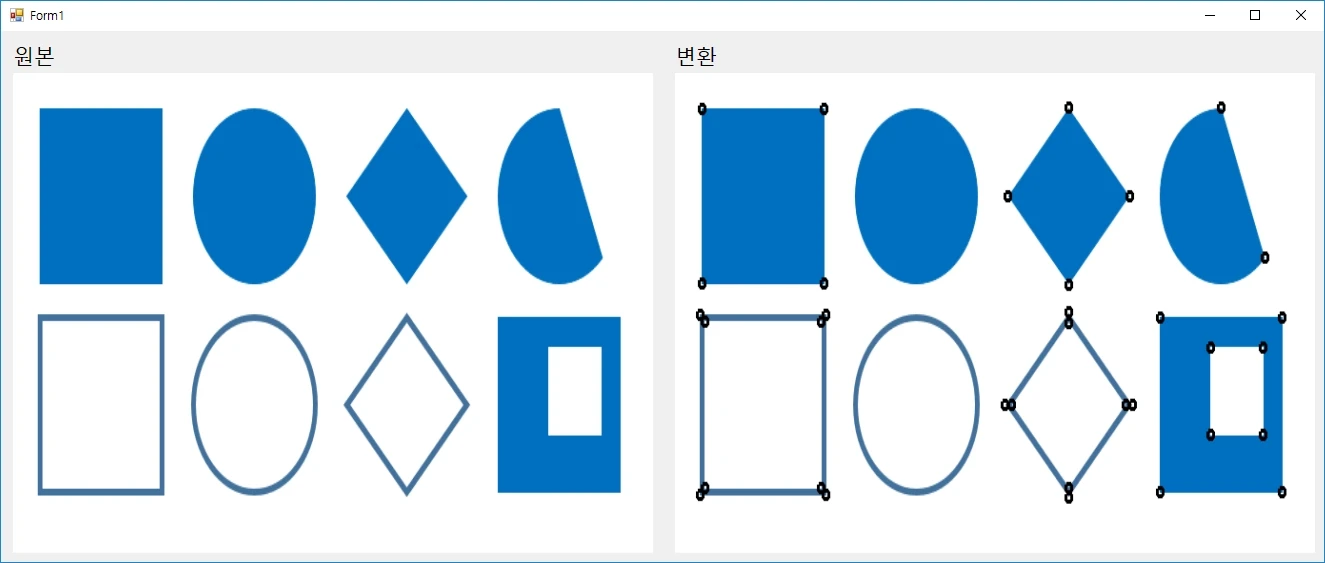
Good Feature to Track - Harris Corner Detector
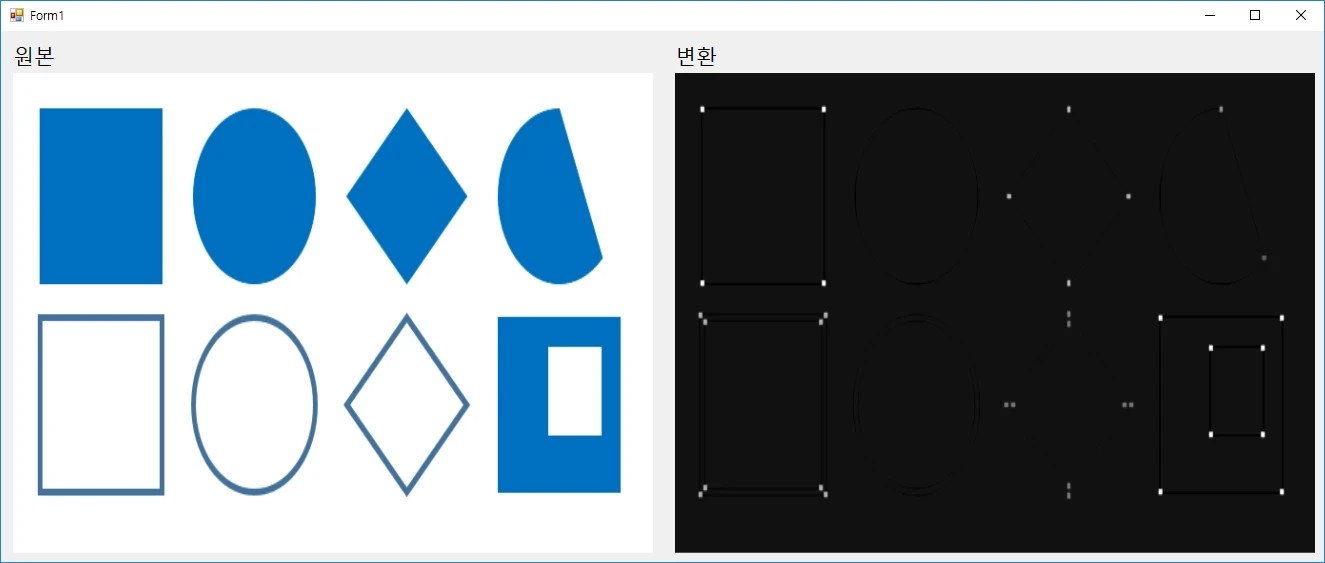
Harris Corner Detector
공유하기
 Kakao
Kakao
 Naver
Twitter
LinkedIn
Facebook
Naver
Twitter
LinkedIn
Facebook
댓글 남기기